

Section: New Software and Platforms
Audiovisual Robotic Heads
|
Functional Description
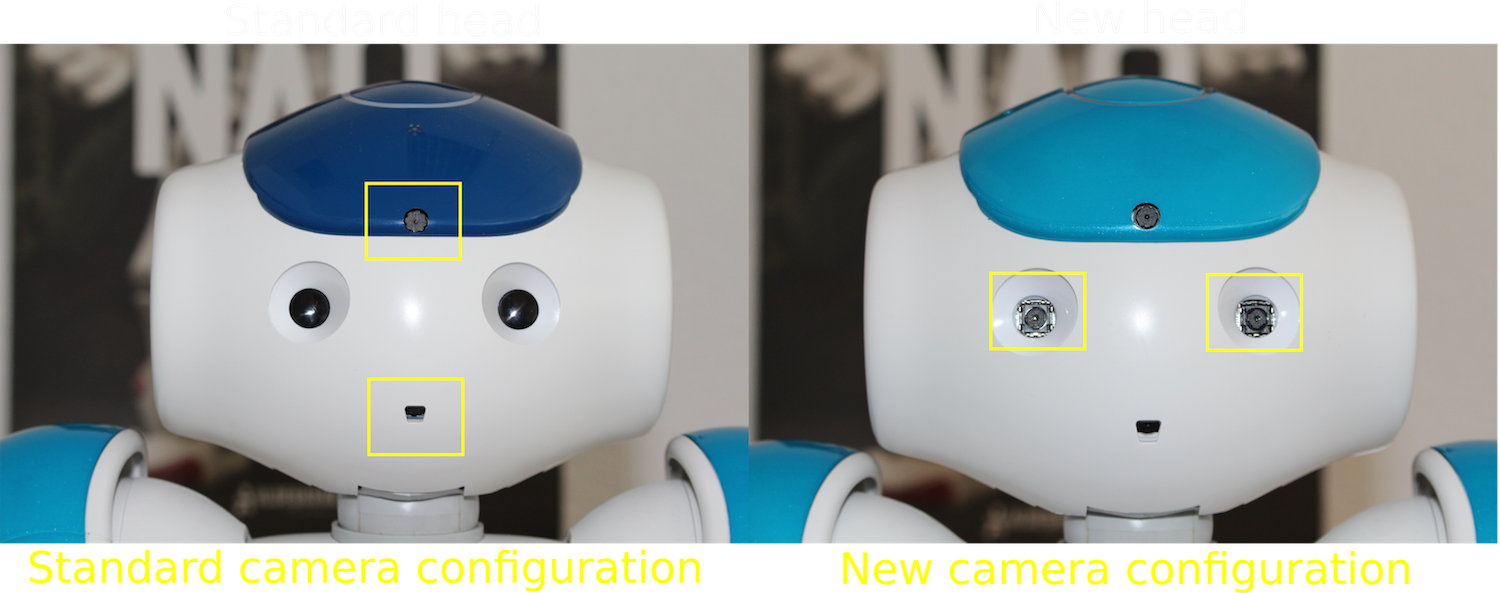
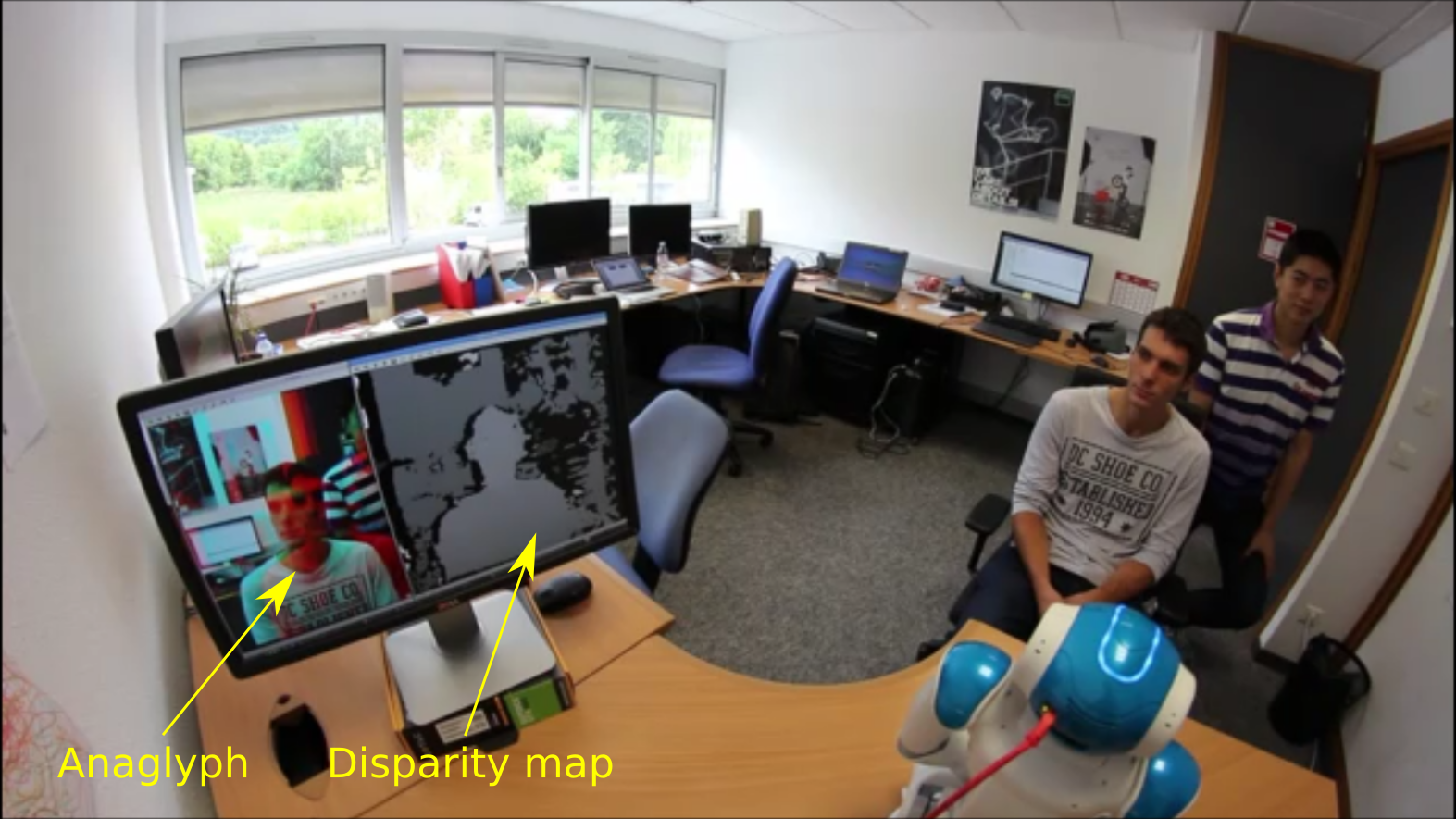
The team has developed two audiovisual (AV) robot heads: the POPEYE head and the NAO stereo head. Both are equipped with a binocular vision system and with four microphones. The software modules comprise stereo matching and reconstruction, sound-source localization and audio-visual fusion. POPEYE has been developed within the European project POP in collaboration with the project-team MISTIS and with two other POP partners: the Speech and Hearing group of the University of Sheffield and the Institute for Systems and Robotics of the University of Coimbra. The NAO stereo head was developed under the European project HUMAVIPS in collaboration with Aldebaran Robotics (which manufactures the humanoid robot NAO) and with the University of Bielefeld, the Czech Technical Institute, and IDIAP. The software modules that we develop are compatible with both these robot heads.